Sistema doble de alimentación de tuercas metálicas con selección por visión para 30 modelos.
CASO PRÁCTICO RNA-VIBRANT
RNA Vibrant ha diseñado y desarrollado un sistema doble e independiente de alimentación de tuercas metálicas con selección por sistema de visión para 30 modelos. Con una posición de salida de 1 cara sin orientar radialmente.

Sector: Industrial
Cadencia: 10 u/minuto salida.
Autonomía: 60 min.
POSICIÓN DE SALIDA
Por el tipo de pieza hay 2 posiciones naturales de orientación de las cuales sólo 1 es aceptable para su manipulación. La pieza se entrega con una cara hacia arriba; dependiendo del modelo será una silueta u otra.
El sensor de visión y más concretamente su software de tratamiento de imagen, permite distinguir el perfil seleccionado en el programa de los demás modelos, así como de la propia cara opuesta y actuar en consecuencia activando una electroválvula de soplado para piezas rechazadas que son retornadas a la cuba en posición aleatoria.
DESCRIPCIÓN DE EQUIPOS
| Almacén AV-5 (15 dm3) | Sensor visión OMRON |
| Equipo circular SRC-N 250, con cajón de retorno | Pantalla-panel interfaz de comunicación |
| 1 cinta-pulmón de 1200mm | Electroválvula con boquilla de soplado )o peine) |
DESCRIPCIÓN DE FUNCIONES
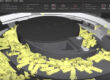
Las piezas se cargan en la unidad de almacenamiento o autonomía, el dosificador AV-5, que alimentará el equipo circular de vibración a demanda de la señal del palpador dispuesto en el circular donde las piezas son pre-orientadas, y el flujo “lavado” de piezas volteadas para quedar en 2 posiciones (planas, cara arriba o abajo), para posteriormente pasar por una cinta donde se encuentra el disparador (trigger), compuesto por una barrera de horquilla, que activa el sensor de visión que a través del software es el que determina si la pieza coincide con el patrón seleccionado previamente configurado (cara seleccionada como correcta), realizando así la selección de la pieza inequívocamente.
Los equipos estándar de vibración incluyen los sensores estándar de nivel y saturación. Una vez en la cuba, las piezas se posicionan de la forma deseada y salen a través de la boquilla hacia la guía de la cinta transportadora que actúa de sincronismo para la selección y de pulmón para acumulación.
El sistema de manipulación de piezas compone de una estación de recepción con desplazamiento lateral para el robo unitario de la pieza.
MANIOBRA
Los sensores y actuadores están ensamblados en fábrica. RNA-Vibrant realiza una verificación del sistema mediante una simulación de funcionamiento real.
Al estar los mecanismos de sincronismo de la cámara y de acumulación fusionados en una sola cinta y la maniobra de introducción de la pieza en la estación mencionada, se realiza arrancando y parando la cinta, ocurre que en cada parada de la cinta el sistema pierde la sincronía implicando que piezas en tránsito entre el disparador y la soplada de expulsión, puedan introducirse en posición incorrecta en la cinta de acumulación. Este tipo de maniobra debe ser evitada a toda costa si se instala una sola cinta transportadora, para independizar sincronía de maniobra, puesto que el mecanismo de sincronía (en este caso la cinta) debe estar en funcionamiento permanentemente.
Para más detalles sobre nuestros sistemas de alimentación, contáctenos, quedamos a su disposición en el teléfono o correo electrónico +34 933 777 300 info@vibrant-RNA.com.